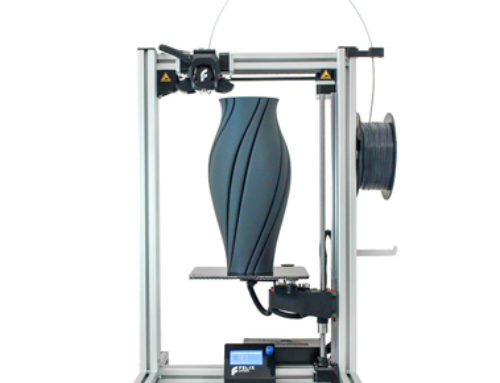
نظرة عامة:
الروبوت المتتبع للخطوط هو مركبة آلية موجهة ، يتبع خطًا مرئيًا مدمجًا على الأرض أو السقف. عادةً ما يكون الخط المرئي هو المسار الذي يسير فيه الروبوت التابع للخط، حيث يمكن ان يكون الخط أسود على سطح أبيض ،والعكس صحيح (خط أبيض على سطح أسود). وتستخدم بعض الروبوتات المتتبعة للخطوط المتقدمة المجال المغناطيسي غير المرئي كمسار لها.
عادة ما تستخدم الروبوتات المتتبعة للخطوط في الصناعات للمساعدة في عملية الإنتاج الآلي. كما أنها تستخدم في التطبيقات العسكرية ، وخدمات التوصيل وغيرها. وسنتطرق في هذا المشروع الى تصميم روبوت متتبع للخطوط بإستخدام اردوينو وبعض المكونات الاخرى.
الادوات المستخدمة:
- Arduino UNO
- L293D Motor Driver IC
- Geared Motors x 2
- IR Sensor Module
- Connecting Wires
- Power supply
- Battery Connector
- Battery Holder
- Black Tape
ينقسم الروبوت الى 4 كتل. الصورة التالية توضح الرسم البياني للكتل:

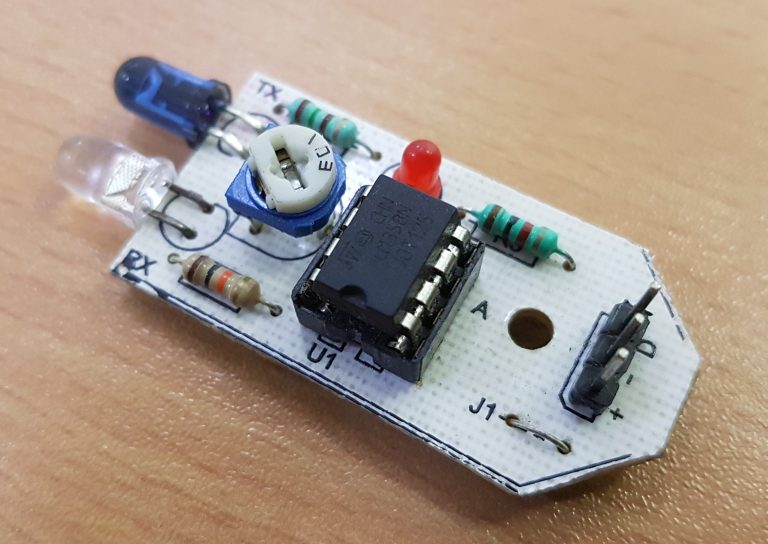
تم استخدام وحدة استشعار IR كمستشعر للكشف عن المشروع. ويتكون من IR LED و الصمام الثنائي للصور وبعض المكونات الأخرى مثل المقارنة وغيرها.
IR Sensor
يمكنك إنشاء مستشعر IR Sensor باستخدام الدائرة التالية:

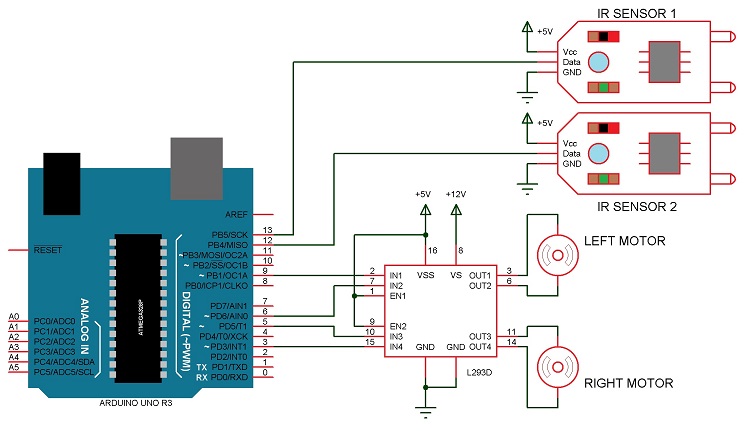
مخطط المشروع:
طريقة عمل الروبوت:
كما هو مذكور في الرسم التخطيطي للكتل ، نحتاج إلى أجهزة استشعار للكشف عن الخط.
بالنسبة لمنطق الكشف عن الخط ، استخدمنا مستشعري IR ، والذي يتكون من IR LED و Photodiode. يتم وضعها بطريقة عاكسة ، أي جنبًا إلى جنب ، بحيث يتم اكتشاف الضوء المنبعث من IR LED بواسطة الصمام الثنائي كلما اقتربت من سطح عاكس.
تُظهر الصورة التالية عمل مستشعر IR النموذجي (LED IR – زوج الثنائي الضوئي) أمام سطح فاتح اللون وسطح أسود. نظرًا لأن انعكاس السطح ذي اللون الفاتح مرتفع ، فإن ضوء الأشعة تحت الحمراء المنبعث من IR LED سيكوّن أقصى انعكاس وسيتم اكتشافه بواسطة الثنائي الضوئي.
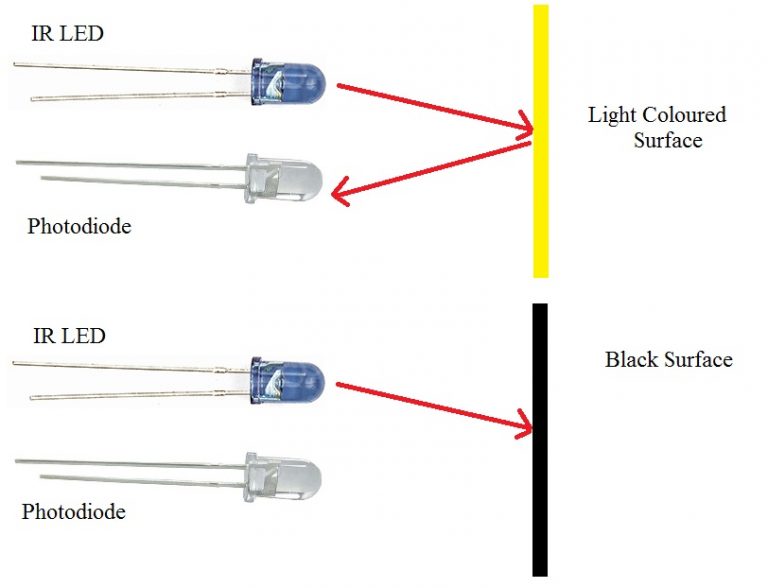
في حالة وجود سطح أسود ذي انعكاس منخفض ، يمتص السطح الأسود الضوء بالكامل ولا يصل إلى الثنائي الضوئي.
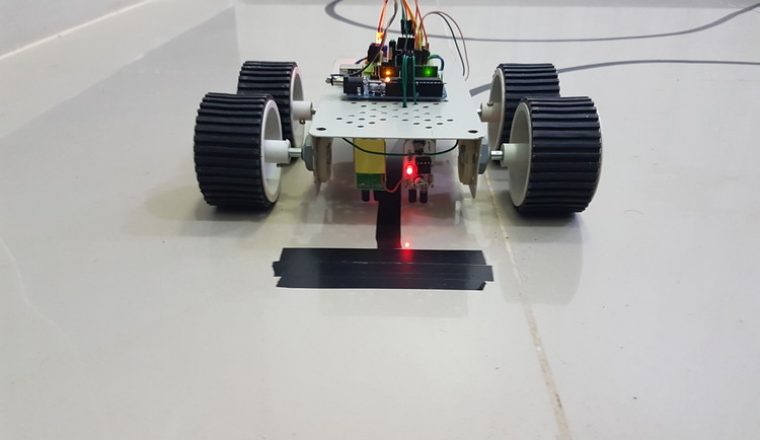
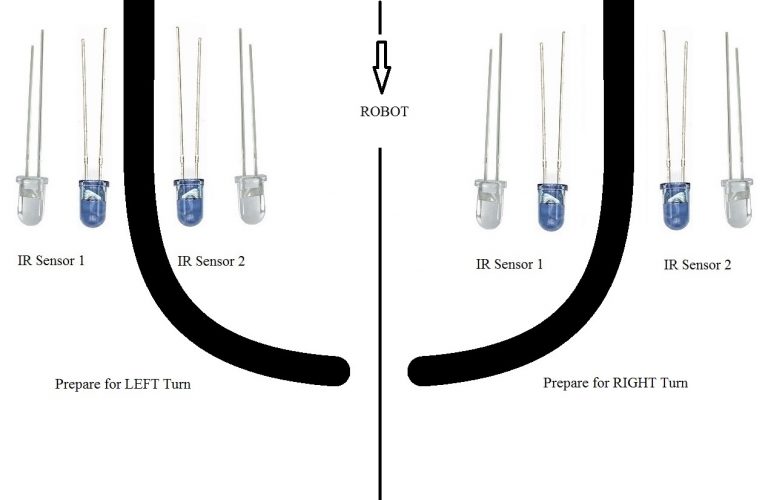
باستخدام نفس المبدأ ،سيتم إعداد IR Sensors على الروبوت المتتبع للخطوط بحيث يكون مستشعران IR في كلا جانبي الخط الأسود على الأرض كما هو موضح أدناه.

عندما يتحرك الروبوت للأمام ، ينتظر المستشعران اكتشاف الخط؛ على سبيل المثال ، إذا اكتشف IR Sensor 1 في الصورة أعلاه الخط الأسود ، فهذا يعني أن هناك منحنى او انعطاف.
بعد ذلك يكتشف Arduino UNO هذا التغيير ويرسل إشارة إلى المتحكم في الروبوت. من أجل الانعطاف يمينًا ، و من ثم يتم إبطاء المحرك الموجود على الجانب الأيمن من الروبوت باستخدام PWM ، بينما يتم تشغيل المحرك الموجود على الجانب الأيسر بالسرعة الطبيعية.
وبالمثل ، عندما يكتشف IR Sensor 2 الخط الأسود أولاً ، فهذا يعني أن هناك منحنىًا إلى الأمام وأن الروبوت يجب أن يستدير لليسار، ولكي يتحول الروبوت إلى اليسار ، يتم إبطاء المحرك الموجود على الجانب الأيسر من الروبوت (ويمكن إيقافه تمامًا أو تدويره في الاتجاه المعاكس) ويتم تشغيل المحرك على الجانب الأيمن بالسرعة الطبيعية.
ويقوم Arduino UNO بمراقبة البيانات من كل المستشعرات باستمرار وتحويل الروبوت وفقًا للخط الذي اكتشفه.